Vex Robotics - 2024
VEX Robotics is a global competition where teams design, build and program robots to compete in team-based engineering challenges. Each season features a new game that tests strategy, innovation, and collaboration, encouraging creativity and real-world problem-solving through STEM.
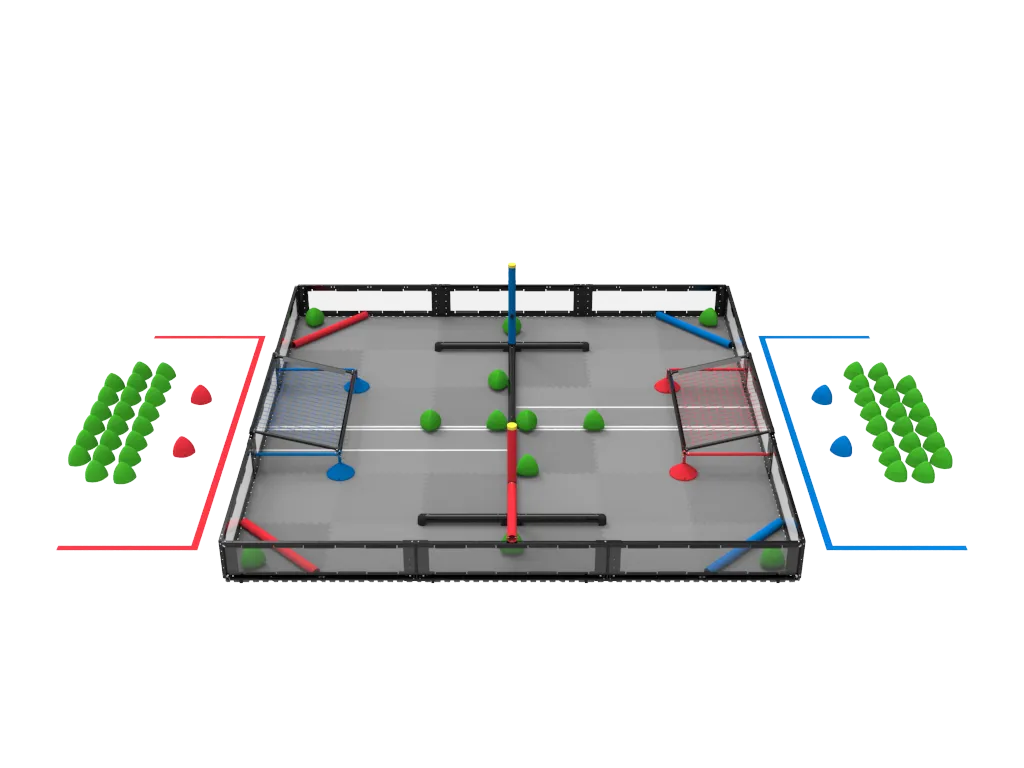
This season’s challenge is called Over Under, which is played on a 12’x12’ square field. Two Alliances of two compete in matches consisting of a Autonomous Period, followed by Driver Controlled Period. The objective of the game is to attain a higher score than the opposing Alliance by Scoring Triballs in Goals and by Elevating at the end of the Match.
Scrimmage
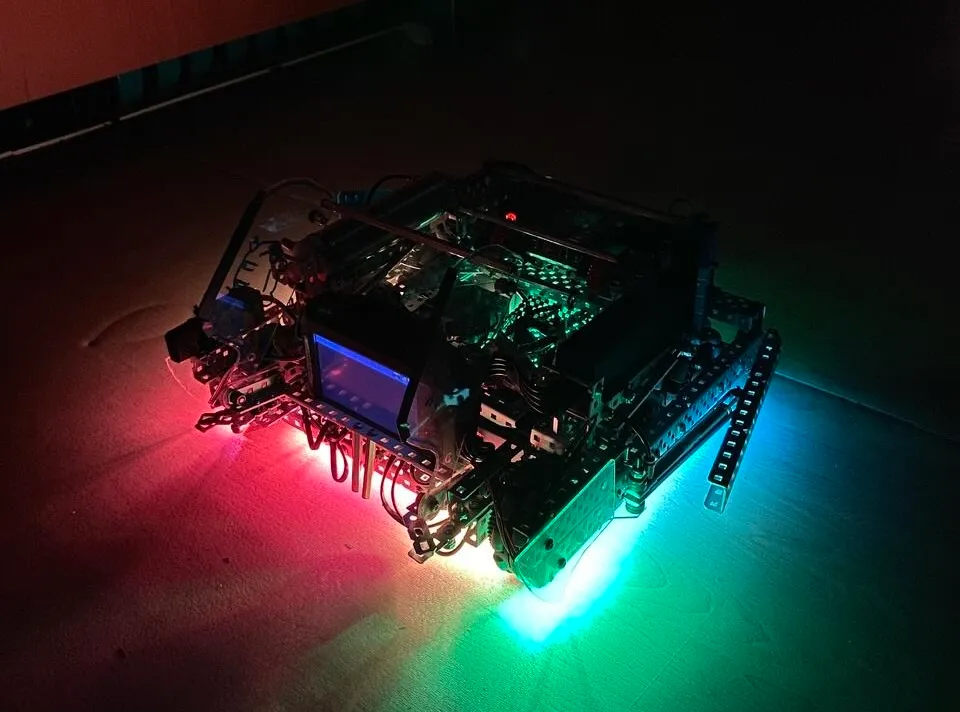
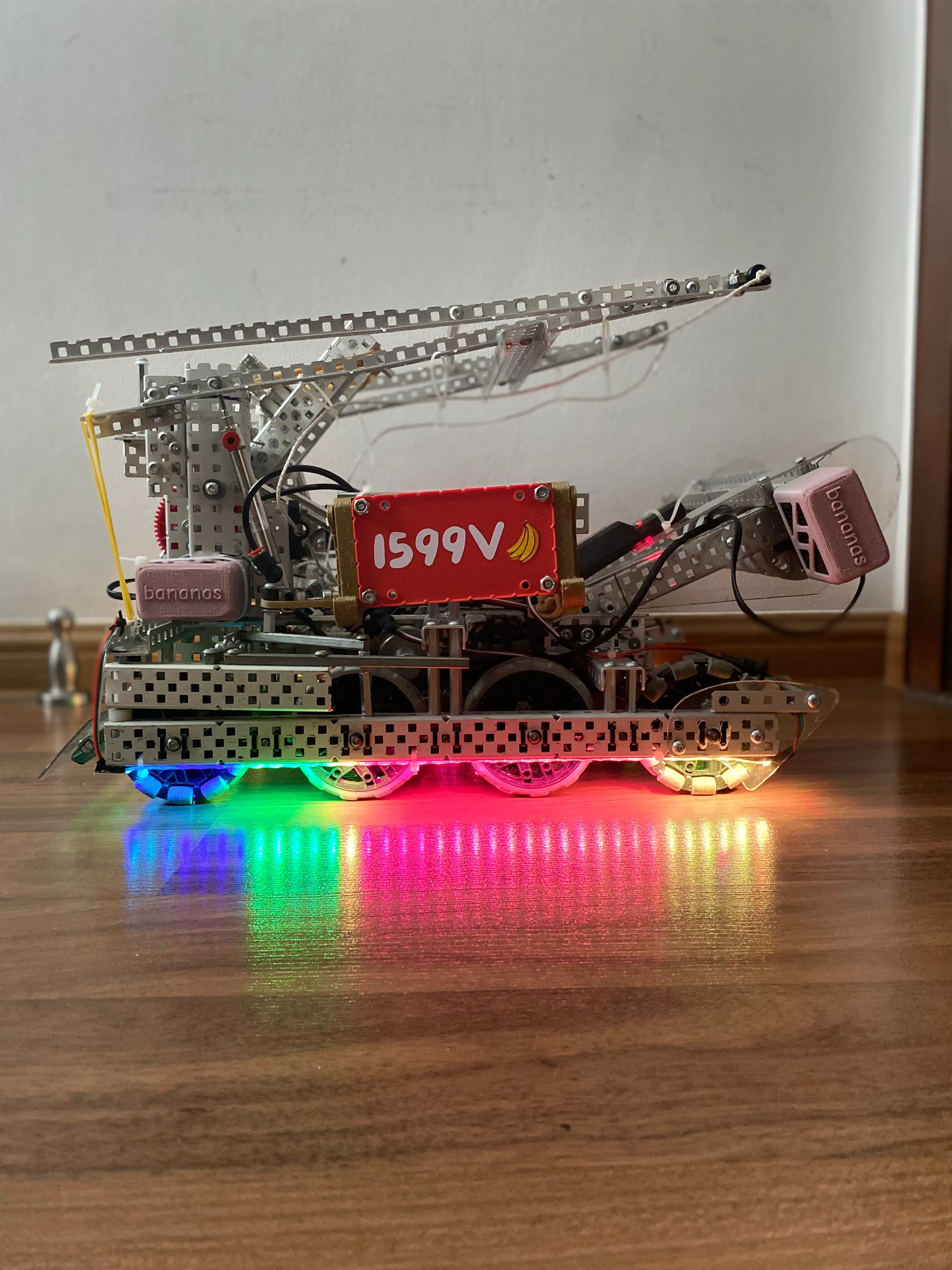
For our first robot, we wanted to create a very low bot that can go inside of the goal and descore. Our biggest issue with this design was that it restricts the catapult shooter so we are not able to score well. One thing we experimented with was using RGB for decoration and we though it looked very cool.

Formosa at TAS (Taipei)
After our first scrimmage, we did a complete rebuild so without the restrictions of a low bot. We went to a scrimmage in Taipei for practice and our robot did better than expected given the short build time, 18th out of 36. Our next steps would be to practice driving more and continue programming autonomous.
Fulbright Scrimmage
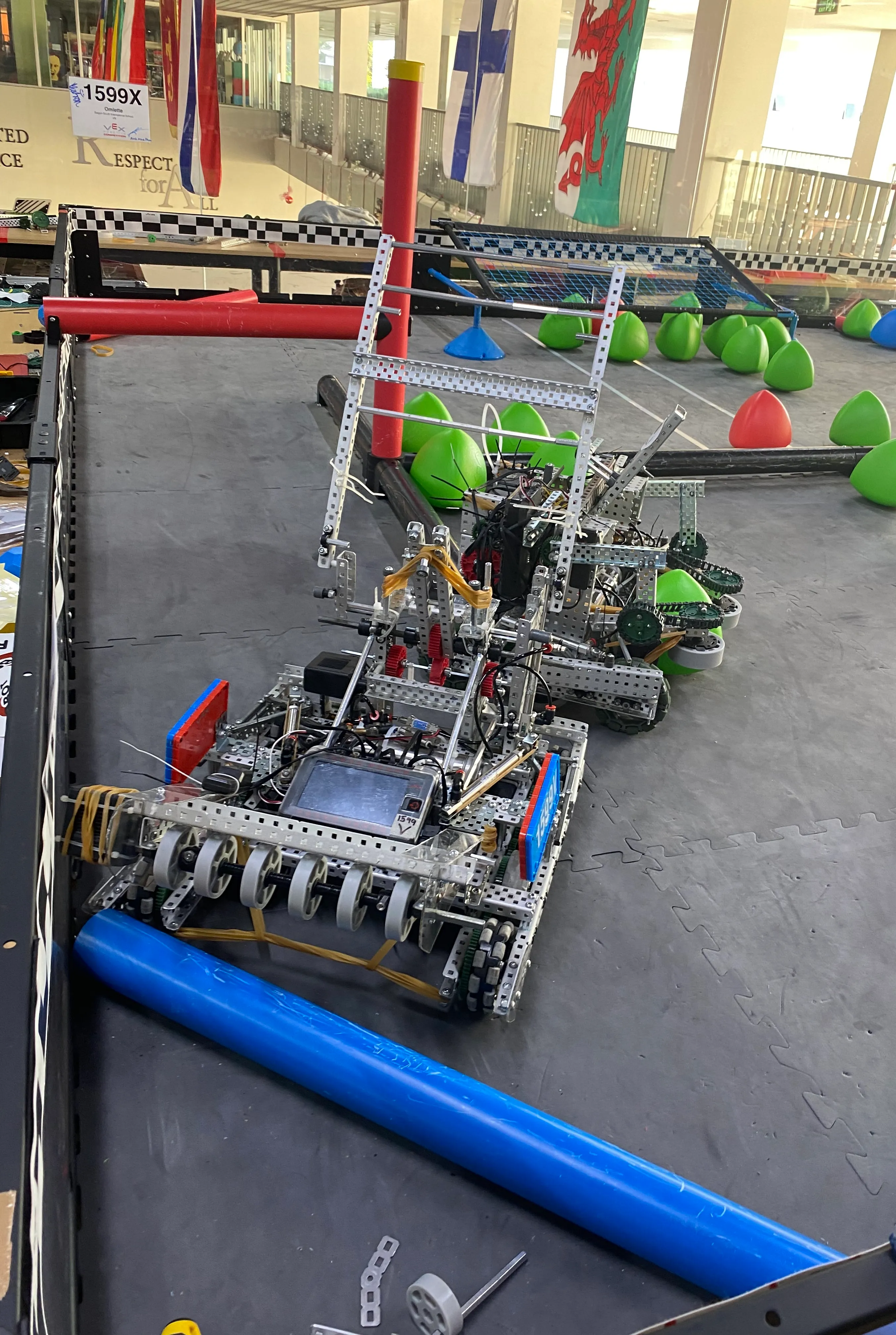
After Formosa, we experimented with the idea of a block which prevents the other team from shooting triballs. Additionally, we designed a balancing mechanism that allows the robot to balance on the poles in the middle (show on the right) without contacting the tiles.

Northern Nationals
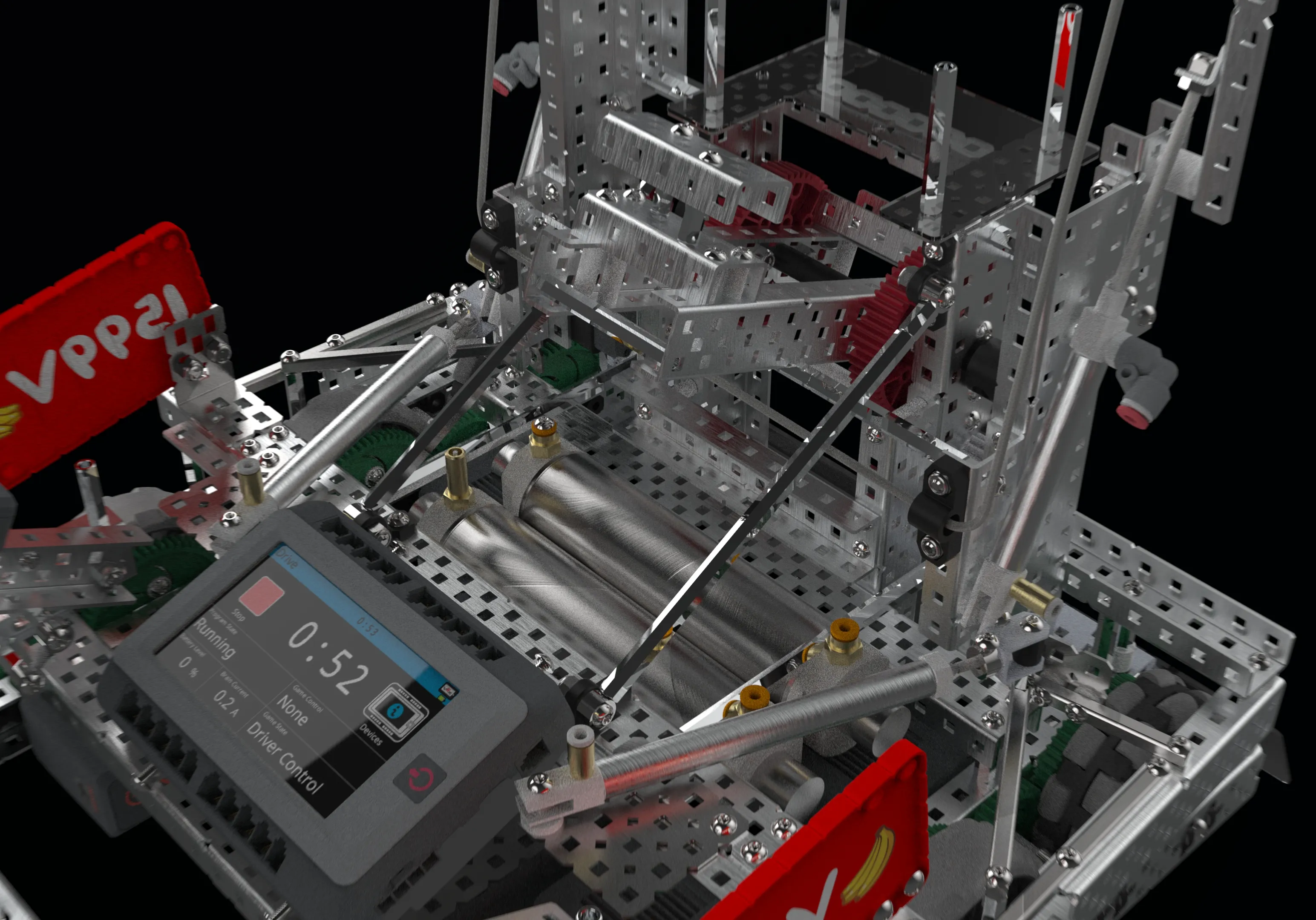
Before Northern Nationals, we extended our blocker to be double stage, to reach high up as we saw some robot had elevated shooters. We also added back our old RGB and painted our controller yellow to match our team colors. Additionally some renders of our robot for marketing. We wanted to print this as a tall poster, a challenge we had was pixelation so we had to render this at 20k. At the event, we lost a lot of matches due to strategic issues however we still received Judges Award. And most importantly, we had fun! This was a interesting event as almost our whole robotics club of 60 flew to Hanoi and we had a lot of shenanigans.




Southern Nationals
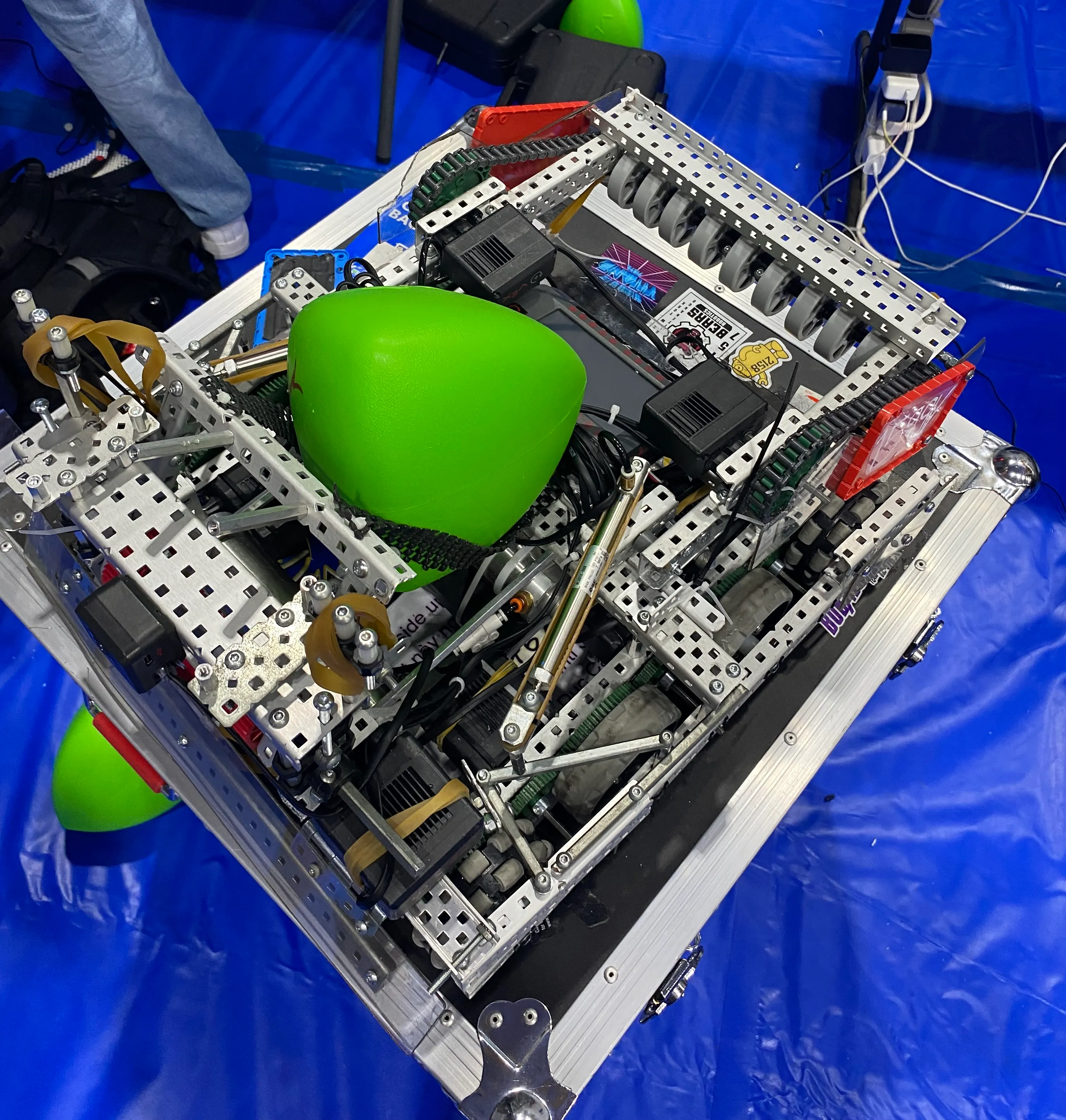
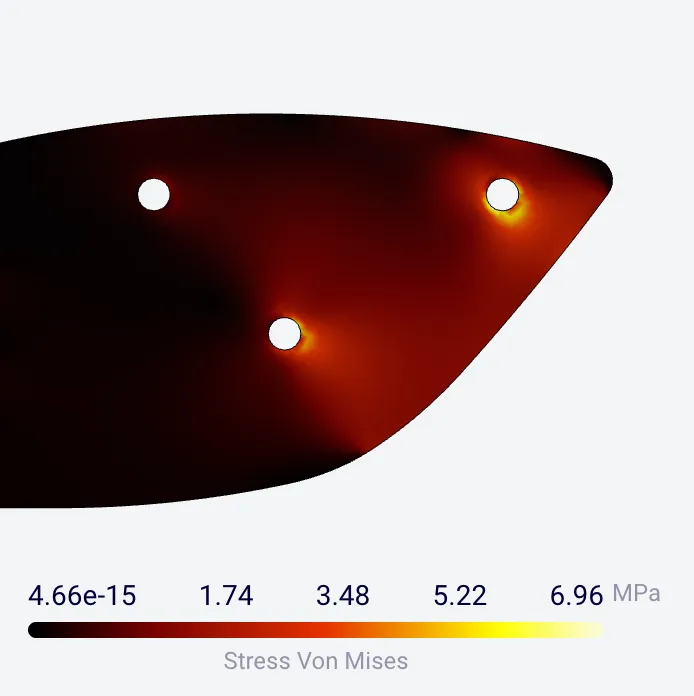
One ability we lacked at hanoi was crossing over the middle beam which would save us time. We solved this with a sled which is a sloped piece of polycarbonate on each side of the robot. We made it one big piece for aesthetical purposes. To ensure rigidity, we did many simulations in order to calculate how many layers we needed and what shapes were most optimal.

During the morning of the event, we had a big issue, our batteries were broken and sometimes would cut out, we were not able to borrow any so we were forced to play with the broken batteries. Our robot turned off mid match for most of our morning matches making us lose all. In the afternoon we allianced with a team and was able to borrow batteries from them. We ended up winning all our matches after that, including finals, making us Tournament Champions. In addition we also got the design award for having the best documentation and interview. Due to our performance issues in the morning however, we were not able to qualify to get the Excellence award which qualifies to World Championships.

Code
Throughout the year, we learnt and tested new motion control algorithms such as PID controller, Pure Pursuit, and Odometry.
At the end of the season, we post our code publicly such that other teams can take inspiration and learn from us. Code Base
https://github.com/alexngyn/1599V-VRC-OVER-UNDER/
Notebook
We also document our build throughout the year which is one of the criteria of the Excellence Award. We write it on paper and here is a scan of our notebook.