Vex Robotics - 2025
VEX Robotics is a global competition where teams design, build and program robots to compete in team-based engineering challenges. Each season features a new game that tests strategy, innovation, and collaboration, encouraging creativity and real-world problem-solving through STEM.
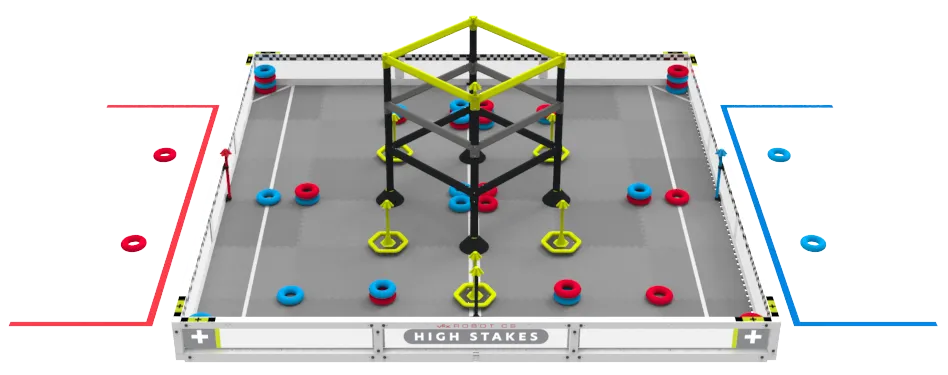
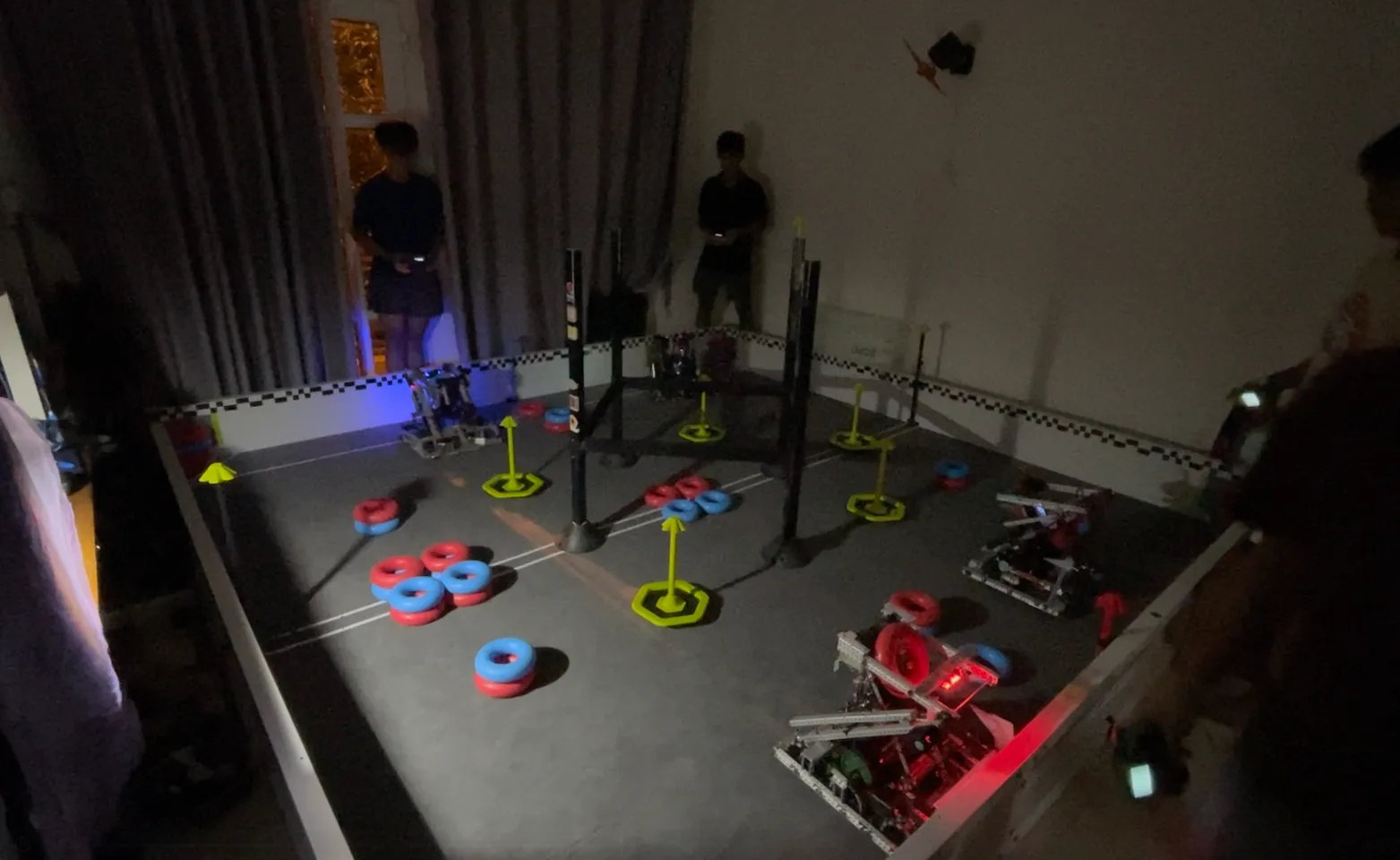
This season’s challenge is called High Stakes, which is played on a 12’x12’ square field. Two Alliances of two compete in matches consisting of a Autonomous Period, followed by Driver Controlled Period. The objective of the game is to attain a higher score than the opposing Alliance by Scoring Rings on Stakes, Placing Mobile Goals, and by Climbing at the end of the Match.
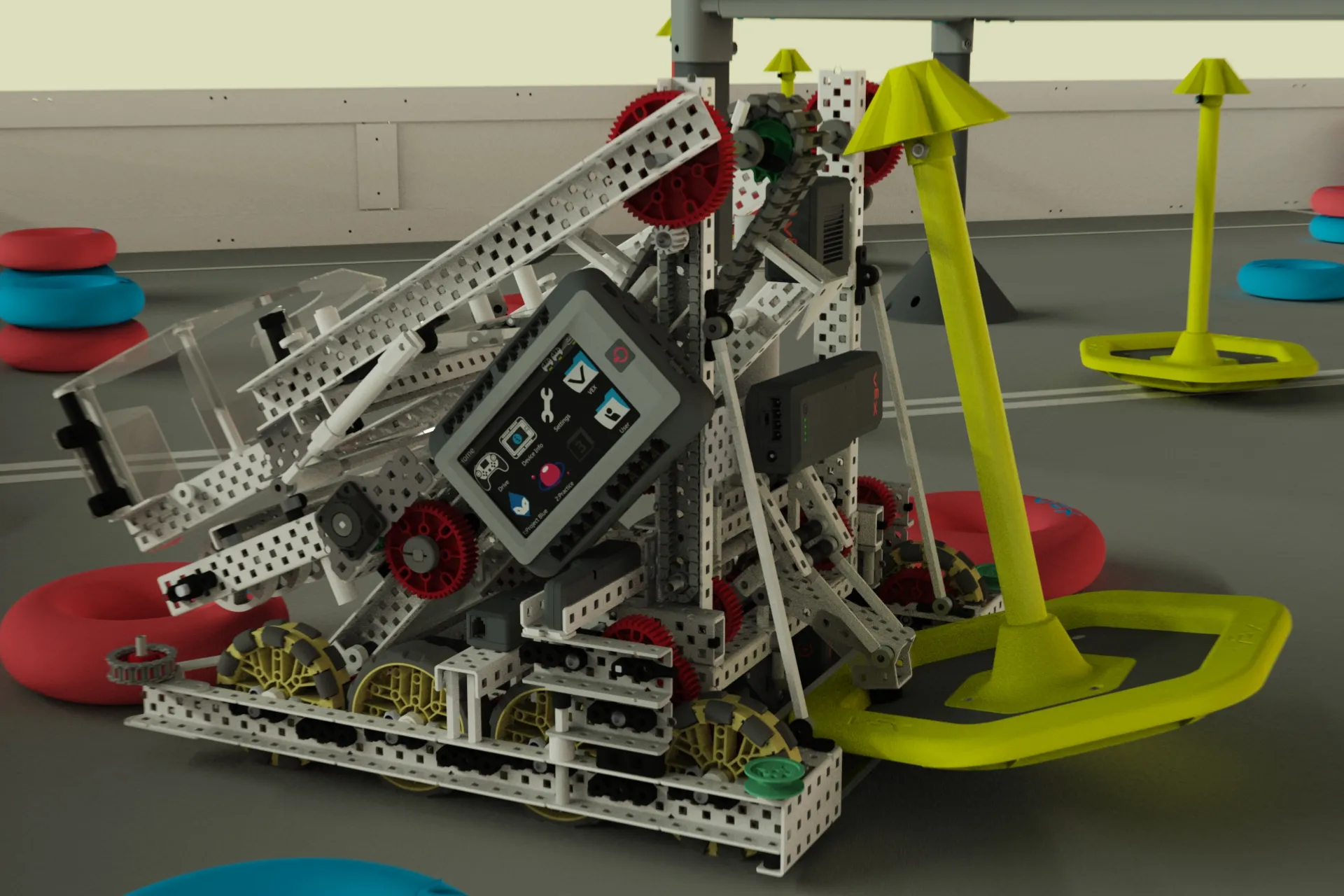
robot v1:
For our first design of the robot, we focused on make it accomplish all 3 task reliably.
SSIS Scrimmage
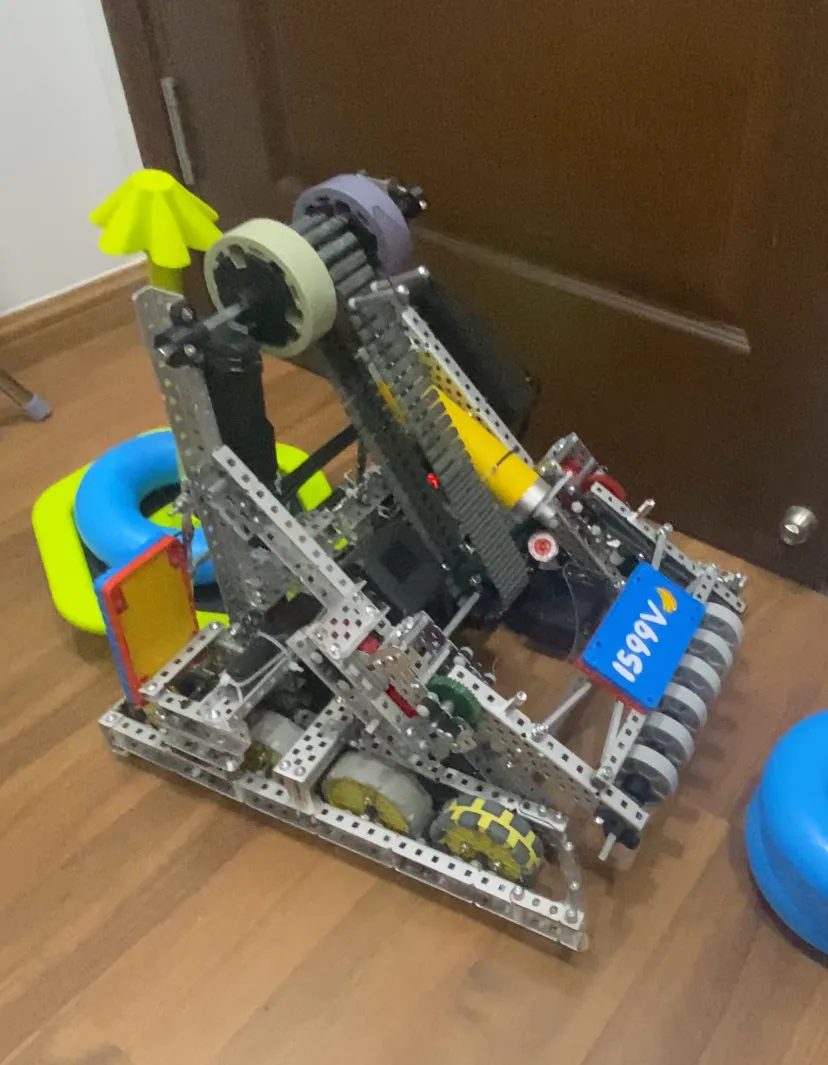
We already had the 3d-design for the robot finished, but we didn’t have time to finish building the robot so we focused on getting the intake done as it is the main way to score points. In addition we spray painted our wheels yellow as it matches our team colors.
We did pretty well with: a 3-1 WL Ratio and getting Quarter Finalists
SSIS Qualifiers
After the scrimmage, we worked on finishing the arm mechanism and the climb.
We did decent this event, going 6-4 WL and getting Finalists.
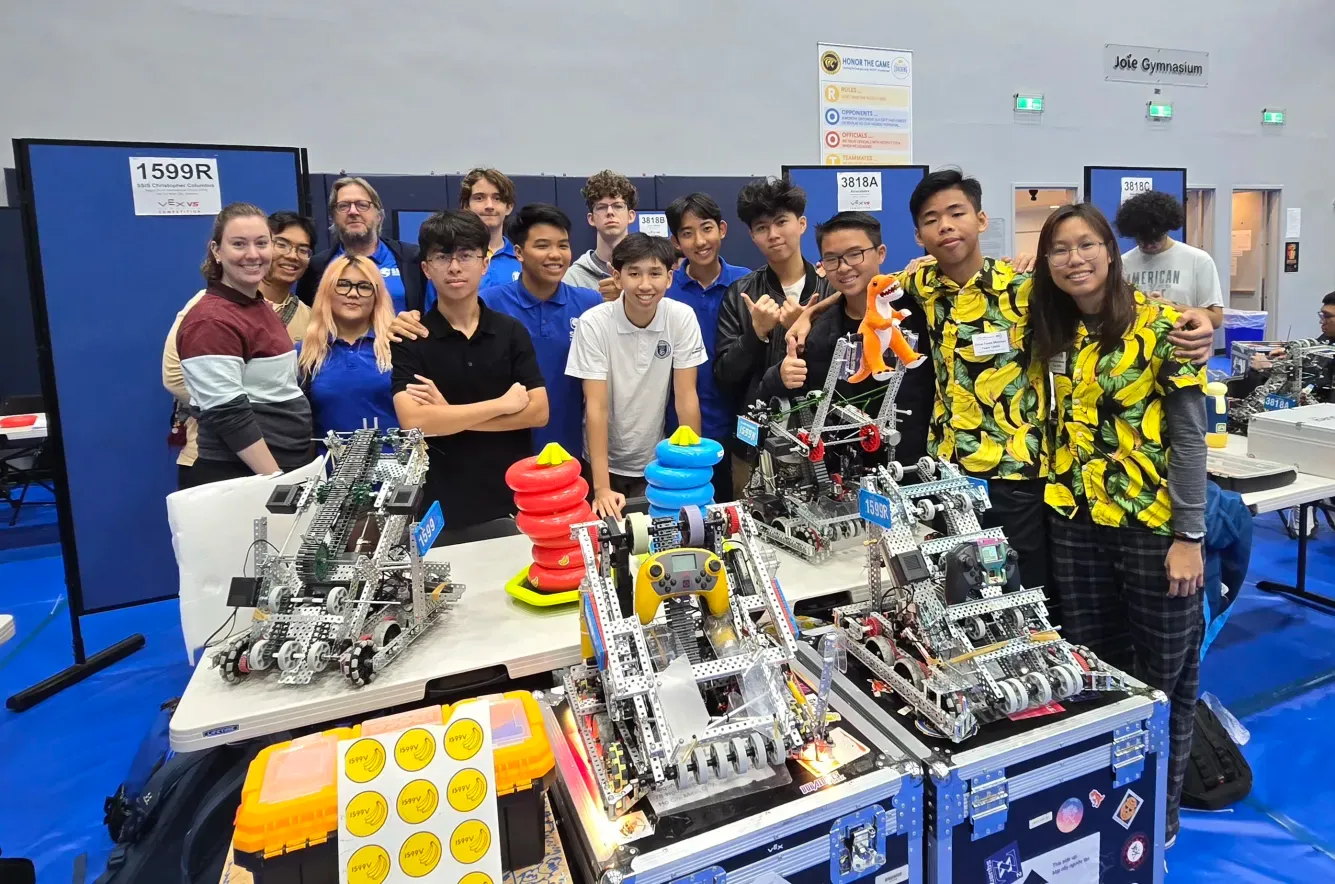
Taipei Formosa
We could not bring our main driver due to visa issue so I was the replacement driver. We did well on our first day, winning all our matches except one and placed 4th place, our second day we did less well and dropped our position down to 10th, we got into alliance selection as 4th seed. Our quarter finals were all 4 teams from my school against each other where my alliance won, in semi finals we won but my teammate made the mistake of accidentally touching a protected goal and got us DQed. Besides the matches, we were able to connect with many teams such as from Manila, Taiwan, and Indonesia.
9-3 WL | Semi Finalists & Amaze Award
After the formosa event, we did a last photoshoot before disassembly.
https://youtu.be/mBvRZt8U8Qg?si=nbRpDXjIo3MQYspG
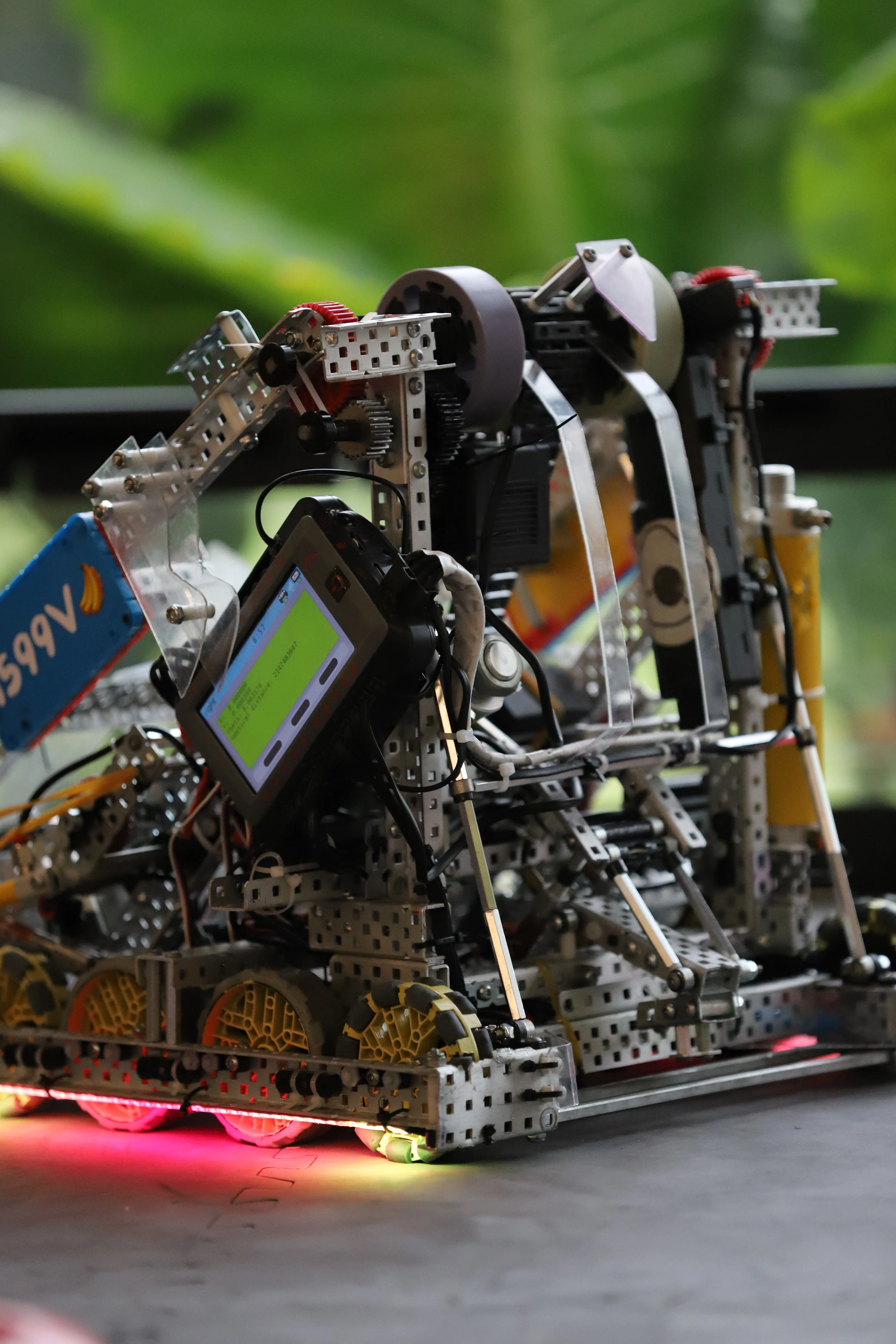

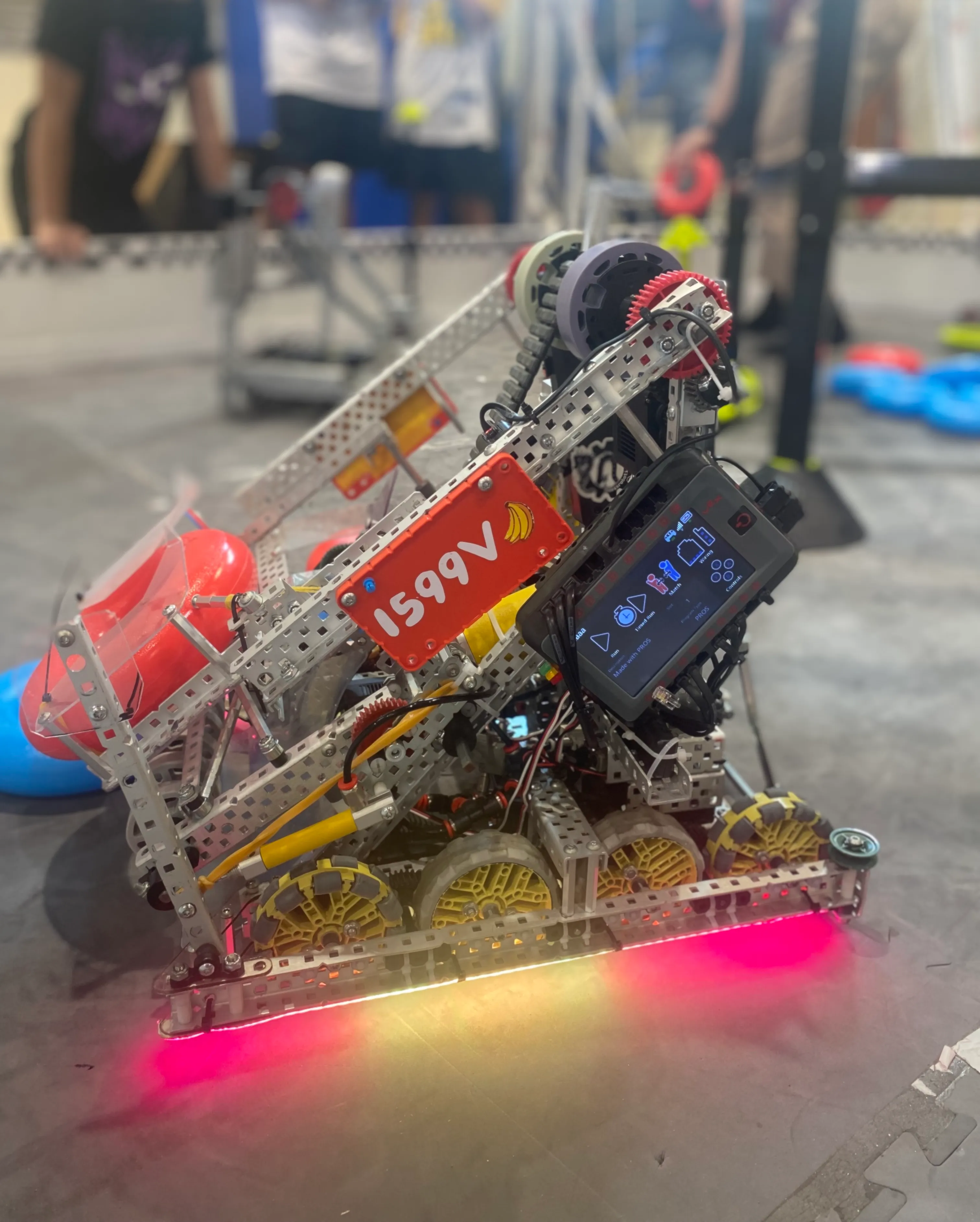
robot v2:
During winter break, we did a complete rebuild of our robot for both functional and aesthetical purposes. We made the drivetrain and arm much faster using a new design, we dyed the gears, and anodized the aluminum.



Southern Regional
At regionals, we did alright during both qualis, and elims, making it to semi-finals.
We went 5-4 WL | Semi Finalists & 1st Seed & Design Award (Qualifies to Worlds!!!)
Both us and our alliance partner (50922t mako maniacs) qualified to worlds at the event.


National Championship
Over the Lunar New Years break, we focused on programming and practice driving. We had a lot of mini scrimmages between us and the 7 other LSTS teams.
For nationals, I went alone as my team were busy with other competitions. I did very well, winning 7/7 of my matches the first day. The second day wasn’t as great, losing both matches.
I ended up 7-2 WL | Quarter Finalists & 1st Seed & Innovate Award.


World Championship
Before worlds, we did a photoshoot for our second bot in collaboration with Mako Maniacs.

https://youtu.be/rSgFvcMYWUY?si=nF1X1HVLYvurlXp9 https://youtu.be/0a5Bvlmqrs8?si=_lBHF1rqRzINThV0
During worlds we didn’t do as well as expected, going 2-6. At least we got the Create Award.



Code
Throughout the year, we learnt and tested new motion control algorithms such as PID controller, Pure Pursuit, and Odometry.
At the end of the season, we post our code publicly such that other teams can take inspiration and learn from us: Code Base
https://github.com/alexngyn/1599V-VRC-HIGH-STAKES
Documentation
We also document our build throughout the year which is one of the criteria of the Excellence Award. We write it on paper and here is a scan of our notebook.